
Ich habe mal meine Festplatte aufgeräumt und bin auf einige Fotos, von einem etwas älteren Projekt gestoßen.
Als Abschlussprüfung meiner Ausbildung, habe ich eine Steuerungsplatine für einen Roboter entworfen.
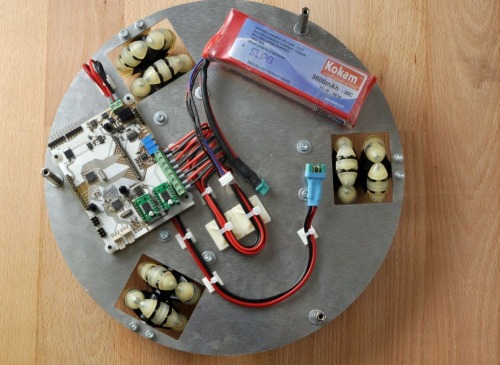
Die Platine sollte als eine Lernplattform dienen und möglichst auf Arduino basieren. Damit ich es nicht so langweilig wird, eine nackte Platine zu präsentieren, habe ich dafür ein Chassis entworfen.
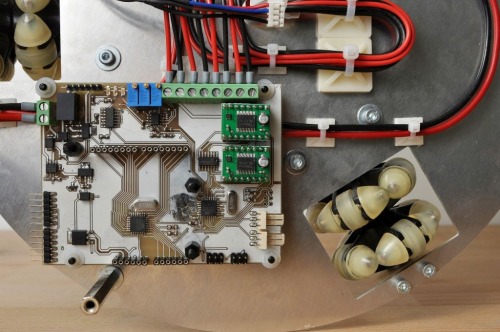
Damit ich nicht zu viele Pins durch Motoransteuerung etc. belege und somit das Betreiben eines Arduino Shields fast unmöglich wäre, habe ich zwei Controller eingesetzt die über I2C kommunizieren. Somit ist ein Controller für Motoransteuerung, ein paar Sensoren und Akku-Überwachung zuständig und mit dem zweiten Controller, kann man einen beliebigen Arduino-Shield ansteuern. Platine wurde entworfen in EAGLE.
Die Versorgung bzw. der Akku wird mehrfach überwacht. Die Spannungsüberwachung erfolgt zweifach. Zum einen wird die Spannung am Spannungsteiler über ADC eingelesen und zum anderen, über einen Komparator, bei dem man die Schwellspannung mit einem Potentiometer einstellen kann. Der Ausgang des Komparators und ein digitaler Pin des Controllers, gehen auf einen AND-Gatter, der den MOS-FET ansteuert, der dann die Versorgung zum Rest der Schaltung schaltet. Zum Einschalten wird der MOS-FET mit einem Taster überbrückt. So wird der Controller aktiv und misst die Spannung. Sollte die Spannung zu niedrig sein und man lässt den Taster los, geht das Ganze wieder aus, da der MOS-FET nicht leitend wird.
Um auch während des Betriebs den Strom zu überwachen, wurde ein ACS712 Stromsensor eingebaut, dessen Ausgangsspannung mit einem OP verstärkt wird und ebenfalls an einen ADC des Controllers angeschlossen ist.
Der Roboter hat einen Durchmesser von 30cm. Auf der Oberseite wurden noch vier Solarzellen angebracht. Dadurch kann man eine Ladeschaltung anschließen um Akkus zu laden.
Nochmal grob die technischen Daten.
Prozessor: 2x ATmega328p mit Arduino Bootloader
Distanzsensoren: 1x SRF05, 1x GP2Y0A02YK, 1x ACS712
Antrieb: 3x Maxon Getriebemotoren mit 3x Omni-Wheels
Motortreiber: 2x TB6612FNG
Hier noch einige Fotos 🙂