 Ich weiß nicht mehr, wie oft ich schon über diesen Roboter geschrieben habe, diesen in Foren und in meinen alten Blogs vorgestellt habe. Bubble war mein erster Roboter, den ich selber entwickelt und gebaut habe. Das gesamte Projekt hat hat so einige Monate Zeit in Anspruch genommen. Ich habe an dem Projekt auch nicht durchgehend gearbeitet, sondern immer mal wieder Pausen gemacht, mich um kleinere Projekte gekümmert und mir Gedanken gemacht, wie ich das Eine oder das Andere Problem bei Bubble lösen könnte.
Ich weiß nicht mehr, wie oft ich schon über diesen Roboter geschrieben habe, diesen in Foren und in meinen alten Blogs vorgestellt habe. Bubble war mein erster Roboter, den ich selber entwickelt und gebaut habe. Das gesamte Projekt hat hat so einige Monate Zeit in Anspruch genommen. Ich habe an dem Projekt auch nicht durchgehend gearbeitet, sondern immer mal wieder Pausen gemacht, mich um kleinere Projekte gekümmert und mir Gedanken gemacht, wie ich das Eine oder das Andere Problem bei Bubble lösen könnte.
Mechanik / Antrieb
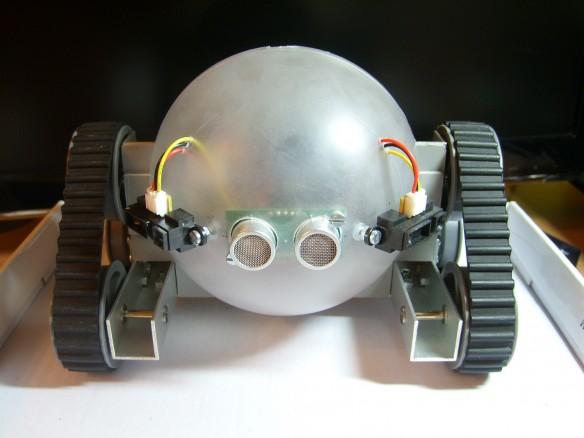
Die Mechanik besteht überwiegend aus U-Profilen aus Aluminium. Der Kopf und die hintere Platte für diesen, bestehen aus Kunststoff. Die Räder und Raupen sind die gleichen, die man auch von einem RP5 oder RP6 kennt. Bei Motoren handelt es sich um Maxon Getriebemotoren. Alle Räder sind doppelt kugelgelagert.
Sensoren
Um die Hindernisse zu erkennen, sitzen vorne ein SRF05 Ultraschallsensor und zwei Sharp IR-Distanzmesser. Für die Rückwärts-fahrt wurden zwei Bumper, verbunden durch ein Aluröhrchen, eingebaut. Ein weiterer kleiner Sensor, ist ein Spannungsteiler, um die Spannung der Akkus messen zu können.
Mikrocontroller / Motortreiber
Als Mikrocontroller-Board habe ich einen Arduino Duemilanove eingebaut. Der Mikrocontroller (ATmega328) bietet genug Ein-/Ausgänge, um den Roboter autonom fahren zu lassen. Als Motortreiber dient ein L293D und um bei der Ansteuerung nochmal zwei Pins zu sparen, habe ich den Trick mit dem Invertierter verwendet. Für den Motortreiber und den Invertierter habe ich eine eigene Platine bzw. Shield entworfen und geätzt.
Um Warntöne etc. auszugeben, habe ich noch einen Piezolautsprecher eingebaut.
Hallo,
einfach Klasse ! 🙂
Danke 🙂