 In dieser Anleitung wird beschrieben, wie man ein Standard-Servo zu einem Getriebemotor mit 360° Drehwinkel umbauen kann (Servohacking). Ein gehacktes Servo für den Antrieb eines Roboters einzusetzen, bietet z.B. den Vorteil, dass man keinen zusätzlichen Motortreiber zwischen Mikrocontroller und Motor braucht. Man muss so ein gehacktes Servo lediglich an die Versorgungsspannung und an einen Mikrocontroller-Pin anschließen – der Rest ist eine Frage der Programmierung.
In dieser Anleitung wird beschrieben, wie man ein Standard-Servo zu einem Getriebemotor mit 360° Drehwinkel umbauen kann (Servohacking). Ein gehacktes Servo für den Antrieb eines Roboters einzusetzen, bietet z.B. den Vorteil, dass man keinen zusätzlichen Motortreiber zwischen Mikrocontroller und Motor braucht. Man muss so ein gehacktes Servo lediglich an die Versorgungsspannung und an einen Mikrocontroller-Pin anschließen – der Rest ist eine Frage der Programmierung.
Werkzeug
Was man für den Umbau braucht, ist ein Seitenschneider und ein Kreuzschraubendreher.

Und jetzt hacken!!! 😀
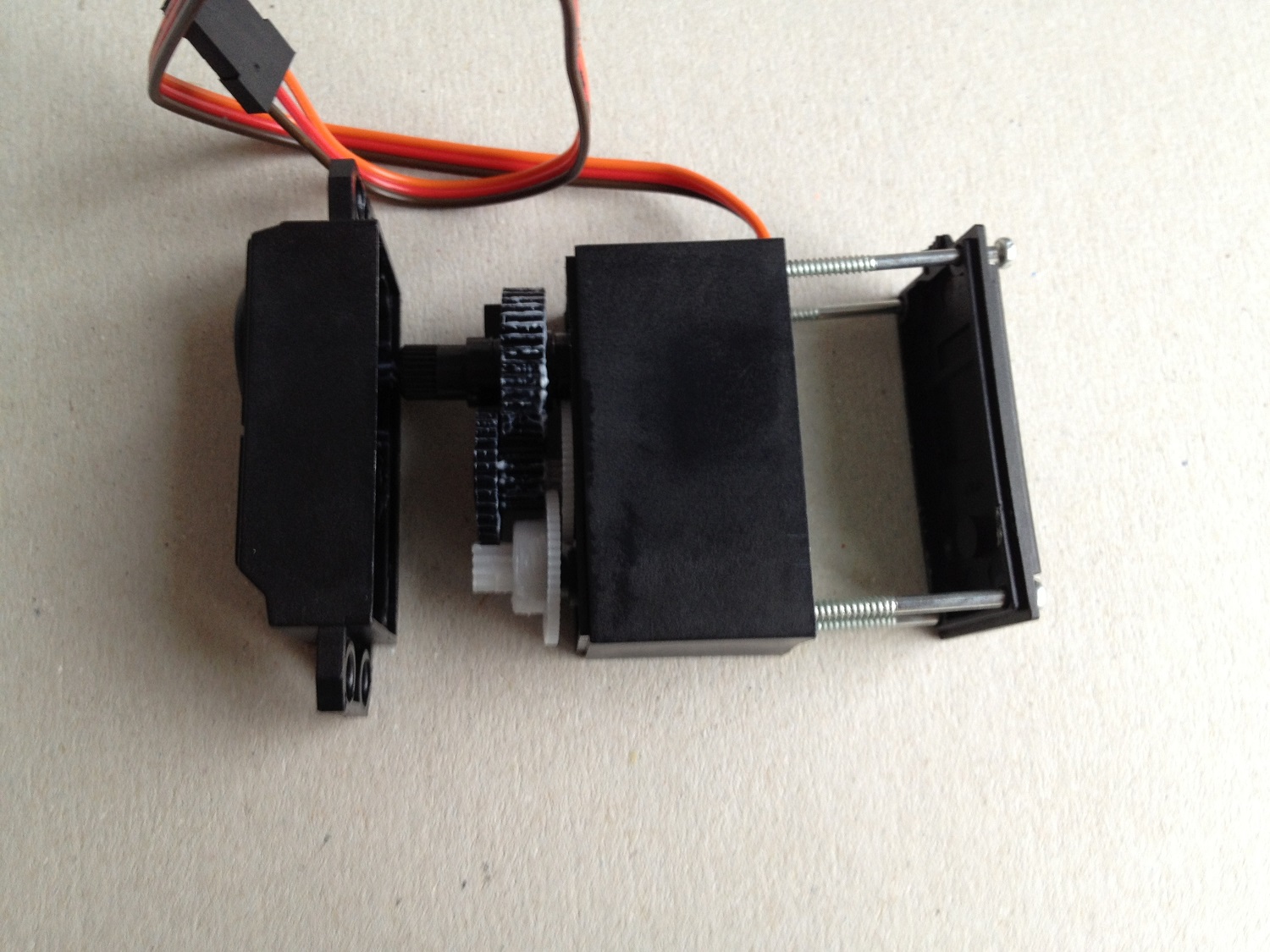
Zuerst werden die vier Schrauben auf der Unterseite des Servos rausgedreht, mit den das Gehäuse zusammengehalten wird. Anschließend zieht man die Gehäuseteile vorsichtig auseinander.
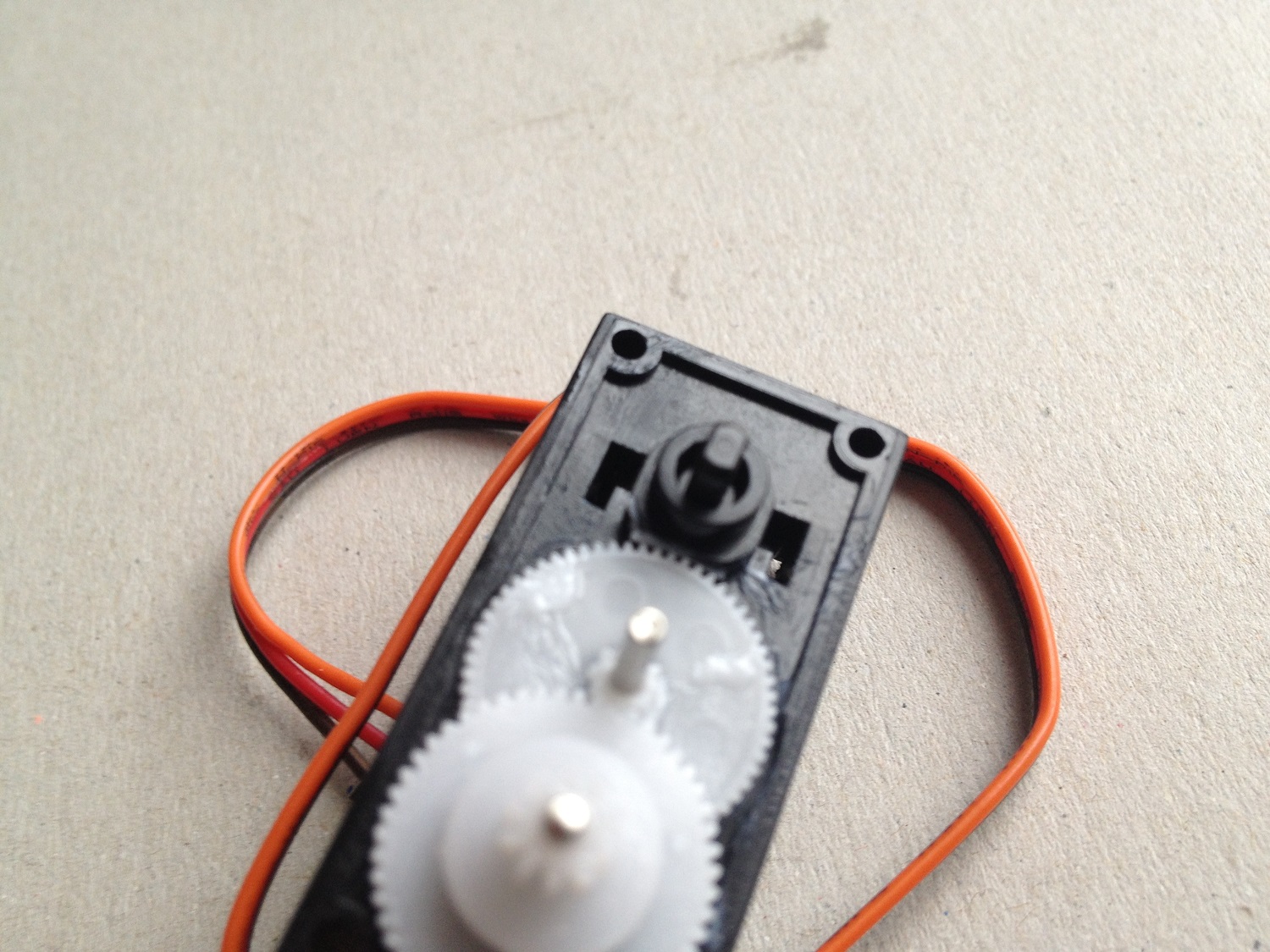
Wenn man jetzt das größte Zahnrad, die eigentliche Drehachse genauer anschaut, sieht man eine kleine „Nase“ bzw. den Anschlag, wodurch eine 360° Drehung verhindert wird.

Diesen Anschlag muss man jetzt mit dem Seitenschneider abtrennen und darauf achten, dass nichts ins Auge fliegt.
Als Nächstes wird noch der Drehkopf vom Potentiometer in die Mittelstellung gebracht und anschließend abgetrennt. Vorher bringen wir ihn aber in die Mittelstellung.
 Was ist bei dem Servo auf dem Bild oben falsch? 😀 Beim Abtrennen habe ich überhaupt nicht aufgepasst und somit den Drehkopf wieder verstellt. Überprüft nach dem Abtrennen ob es immer noch mittig eingestellt ist 😀
Was ist bei dem Servo auf dem Bild oben falsch? 😀 Beim Abtrennen habe ich überhaupt nicht aufgepasst und somit den Drehkopf wieder verstellt. Überprüft nach dem Abtrennen ob es immer noch mittig eingestellt ist 😀
Jetzt noch das Getriebe zusammensetzen und dann kann der Servo wieder zusammengebaut werden.

Noch ein kleiner Tipp: Falls ihr mehrere Servos in eurer Schublade mit Bastelkram habt, markiert die gehackte Servos irgendwie, damit man schnell sieht, dass das ein gehacktes Servo ist 😉
