
Da mein Blog nicht ganz vollständig ist, pflege ich ab und zu mal einige Projekte, Basteleien, Tutorials o.Ä. ein, die es in meinem alten Blog bzw. irgendwo im Netz gab/gibt. Man hat nicht immer Zeit und Lust was nachzupflegen, was man schon paar mal gepostet hat oder es schon etwas länger her ist. Hier ist wieder so ein Artikel aus dem „Archiv“. Eigentlich nichts besonderes, aber vielleicht bringt es den einen oder anderen auf eine zündende Idee, für das eigene Projekt.
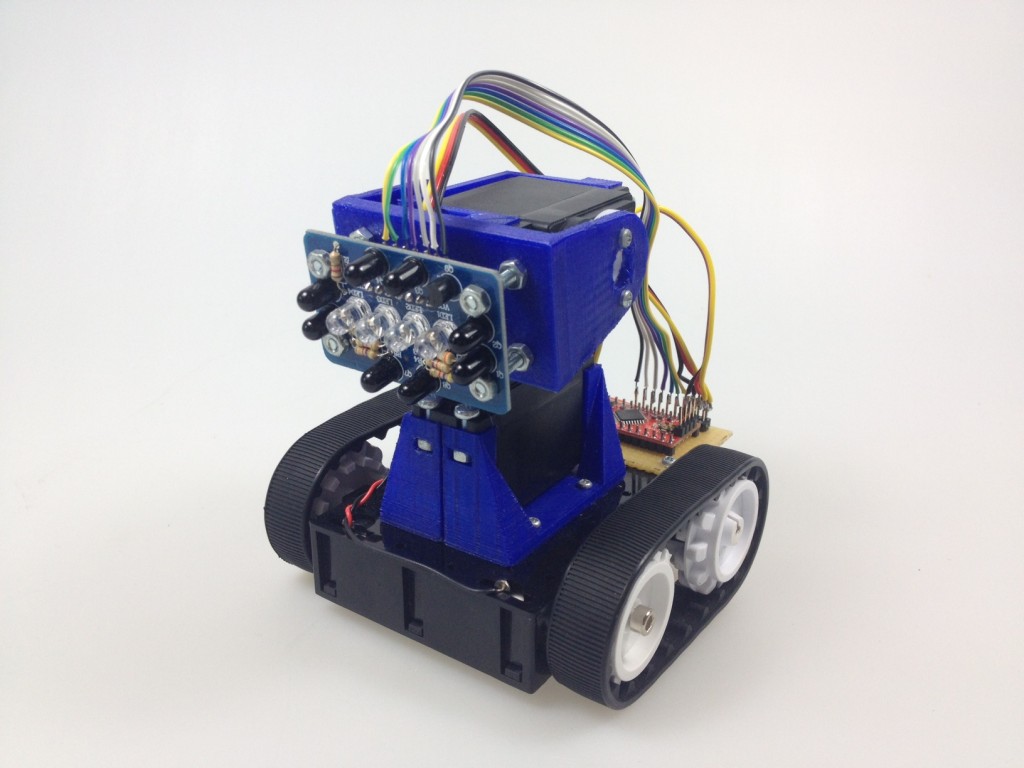
Als ich mir Gedanken gemacht habe, wie ich den Roboter Follower baue, wollte ich mir zuerst den Dagu Compound Eye kaufen. Damals gab es ihn nur bei einem Anbieter (auf die Nennung verzichte ich jetzt mal) in Deutschland. Der Preis für den Sensor war leider überzogen (wie bei den meisten Artikeln dieses Anbieters). Irgendwann dachte ich mir „Ach komm! Für die Wissenschaft! :-)“ und wollte das Teil schon bestellen. Während der Bestellung ist mir dann aufgefallen, dass die Versandkosten des Anbieters jenseits des Durchschnittlichen liegen. Und wieder dachte ich mir „Ach komm! Für die Wissenschaft! :-)“. Kurz vor dem Abschluss der Bestellung, ist mir dann aufgefallen, dass noch mehr Kosten hinzugekommen sind. Woher? Weil ich per PayPal zahlen wollte und in diesem Fall verlangt der Händler dann zusätzliche Gebühren. Bestellung abgebrochen. Das Ganz hatte dann aber auch einen Vorteil, weil ich dann das Wochenende mit einem interessanten Experiment verbracht habe 🙂Ich wollte den Sensor dann quasi selber bauen und da ich dann auch nicht mehr in Stimmung war, überhaupt irgendwo was zu bestellen, wurden die Bauteile verwendet, die bereits in meiner Bastelkiste rumoxidieren.
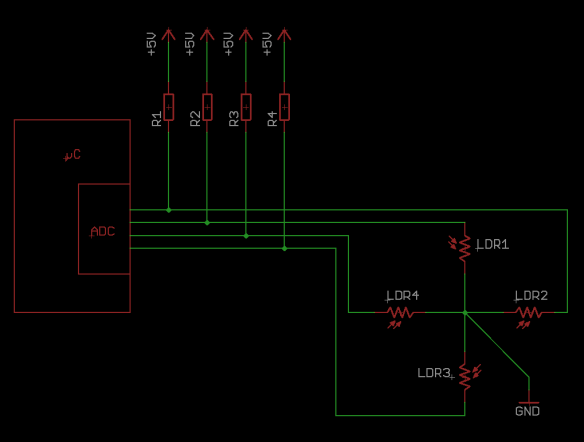
Geplant war eine Zusammensetzung aus einer LED und vier LDR (engl. Light Dependent Resistor – lichtabhängiger Widerstand oder auch Fotowiderstand) um die LED herum. Noch bevor ich die LED angeschlossen habe, habe ich bereits angefangen die Schaltung zu testen und ein Programmcode für das Auslesen der Sensoren und die Ansteuerung der Servos zu schreiben.
Ein kleiner Test:
Moment mal! Funktioniert ja auch ohne LED ganz gut! Nicht ganz. Der Roboter stand auf dem Tisch, ausgerichtet zum Fenster (Lichtquelle) und ich hatte einen Dreher im Programm. Wenn der untere Sensor mehr Lichteinstrahlung detektiert hat und der obere Sensor weniger, hat sich der Kopf nach oben bewegt. Mit einer Lichtquelle im Kopf sollte es eigentlich genau umgekehrt laufen. Mit meiner Hand decke ich die Lichtquelle quasi ab. Wenn man den Roboter mit dem Hintern zum Fenster Dreht und mit der Hand vor der Sensoren winkt, bewegt sich der Kopf genau umgekehrt. Kurzfassung: steht der Roboter mit den Sensoren zum Fenster, bewegt sich der Kopf zusammen mit der Bewegung der Hand. Guckt der Roboter weg vom Fenster, bewegt sich der Kopf in entgegengesetzte Richtung der Handbewegung.
Naja, auch das könnte man im Programm und in der Hardware berücksichtigen, indem man noch einen fünften LDR einbaut, der quasi nach hinten guckt. Dann könnte man anhand der gemessenen Lichteinstrahlung auf den vorderen und auf den hinteren Sensor herausfinden, ob die Lichtquelle sich vor oder hinter dem Roboter befindet. Und was ist, wenn die Lichtquelle sich seitlich befindet? Naja, man könnte auch seitlich Sensoren anbringen und anhand die Position der Lichtquelle berechnen. Ganz schön viele Sensoren, für nur einen kleinen ATmega328 Controller mit 5-7 analogen Eingängen. Eigentlich müsste noch ein Sensor dazu, um festzustellen, ob die Lichtquelle sich oben befindet. Und wie berechnet man dann die Differenz? Und wozu der ganze Aufwand, nur um eine LED im Kopf des Roboters zu sparen? 🙂 Das war wieder so ein Beispiel, was dieses Hobby manchmal ausmacht, nämlich irgendwie mit möglichst viel Aufwand, möglichst wenig Nutzen erreichen.
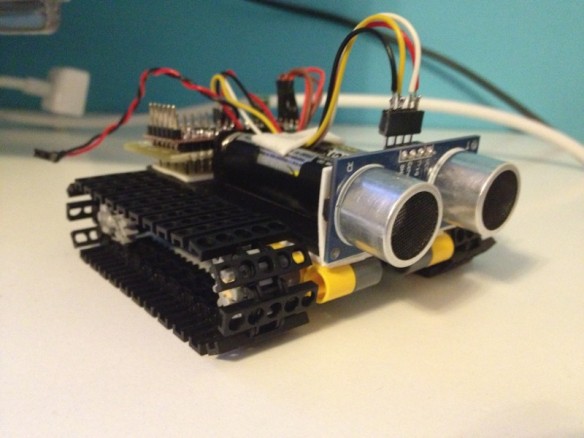
Am Ende wurde der lichtempfindliche Kopf des Roboters durch einen Ultraschall-Distanzsensor ersetzt.
Das Projekt „Follower“ wurde dann für eine unbestimmte Zeit auf Eis gelegt. Irgendwann gab’s den Sensor günstiger und ich hatte das Pololu Chassis und einen 3D-Drucker für ein besseres Pan-Tilt Modul und dann kam auch der Follower 🙂