
Mein Blog ist die meiste Zeit am Schlafen. Das Hobby in letzter Zeit auch. Wenn mein Blog schläft, heißt es nicht immer, dass sich im Hintergrund nichts tut. Ich habe mal etwas auf meiner Festplatte, bzw. hauptsächlich auf dem Smartphonespeicher aufgeräumt und einige Sachen gefunden. Ich habe nicht immer Lust alles zu dokumentieren oder zu veröffentlichen. Bei einigen Sachen handelt es sich noch nicht mal um (eigene) Projekte, sondern um Experimente, Tests, Quick & Dirty Aufbauten, Null Doku usw. In diesem Artikel zeige ich einige Bilder aus dem „Hintergrund“ 🙂
Hexapod
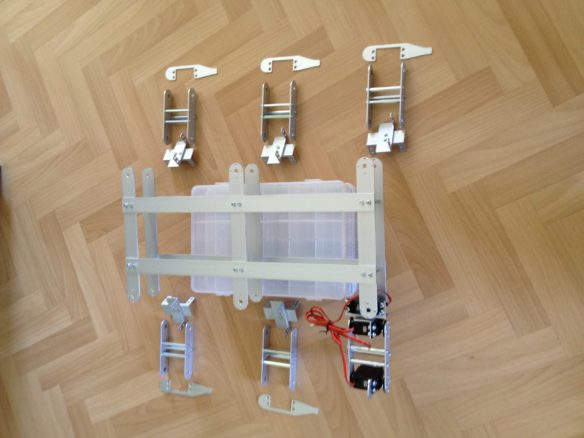
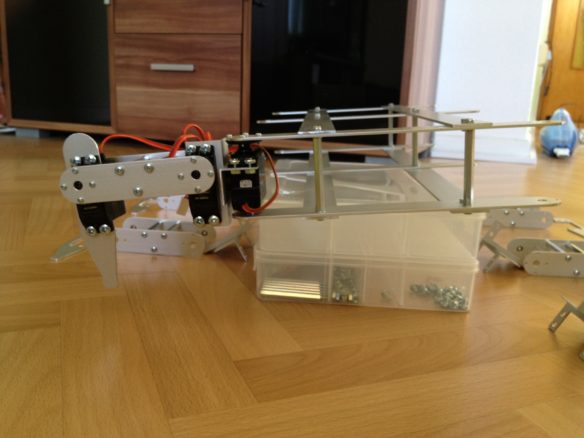
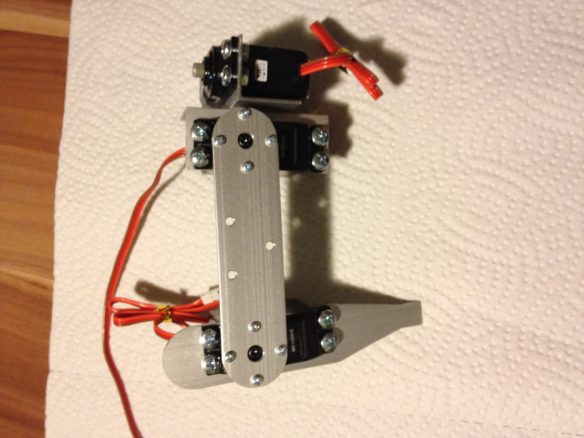
Lange Zeit war es für mich mehr oder weniger ein Traum, einen Sechsbeiner aufzubauen. Die Projektkosten, wenn man das anständig machen möchte, liegen im oberen dreistelligen, wenn nicht sogar im vierstelligen Bereich. Wenn man nicht die entsprechende Ausrüstung hat, kostet es noch mehr. So habe ich mir einiges anschaffen müssen, um anschließend monatelang alle Teile aus Alu-Profilen aus dem Baumarkt anzufertigen. Sägen, Pfeilen, Bohren – alles manuell und bei recht bescheidener Ausrüstung. Als Zünder für den Projektstart dienten relativ günstige Servus mit genug Drehmoment, Metallgetriebe, doppelt kugelgelagert. Nach monatelanger Arbeit (6 Beinmodule + Rumpf) und ich das Geld für die restlichen Servomotoren angespart hatte, musste ich feststellen, dass die Servomotoren abgekündigt wurden. Alternative hat 10-15€ mehr gekostet. Daher wurde das Projekt eingestampft und die Teile habe ich zum Preis der Materialkosten verkauft.
ARC Reaktor

Kennt ihr den Film „Ironman“? 🙂 War einfach mal ein just4fun Projekt.
Beetle Roboter
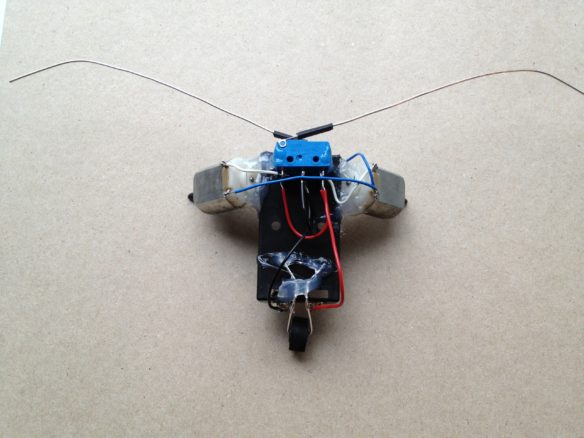
War ein Prototyp für einen etwas sauberer aufgebauten Bot. Von dem Nachfolger habe ich ca. 30 Bauteil-Sets zusammengestellt und mit zwei Freunden Workshops auf einer Maker Faire durchgeführt, wo die Besucher den Roboter aufbauen und anschließend mitnehmen durften 🙂
Adaptiver Greifer aus dem 3D-Drucker

Der Greifer mit drei Fingern, gedruckt mit PLA. War eher eine Eintagsfliege.
Roboterarm aus Holz.

Auch eher eine Eintagsfliege gewesen. Die Stabilität war eher bescheiden.
Pi-Rover

Rumexperimentiert mit einem der ersten Raspberry Pi A, Arduino und Motortreiber.
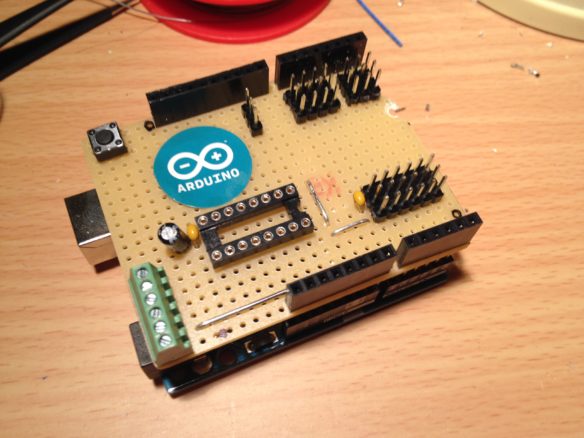
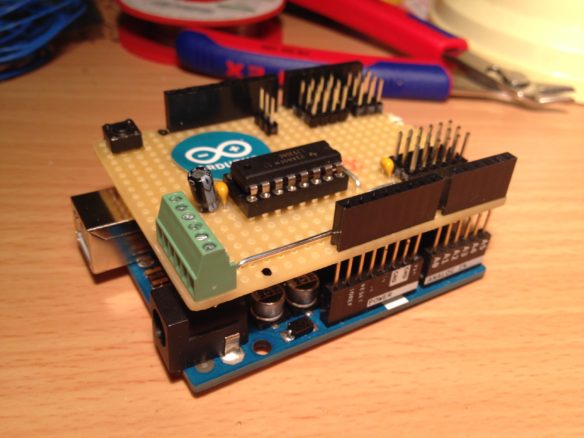
Motor-Shield auf einer Lochrasterplatine für Arduino
Handheld Spielkonsole mit Raspberry Pi

12V auf 170V Spannungswandler für Nixie-Röhrchen

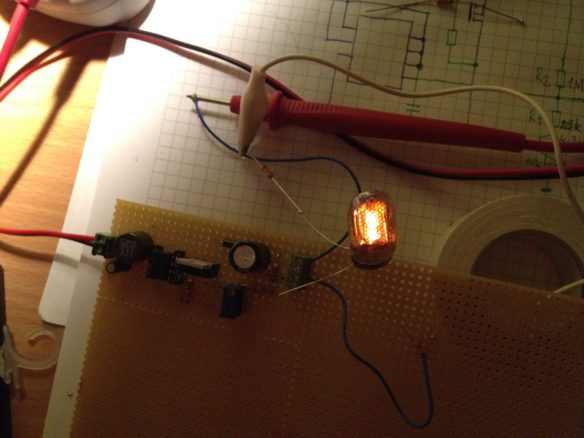
Die Spannung ist ganz und gar nicht mein „Arbeitsbereich“. Definitiv 165V über dem üblichen Wert 🙂
Kleine Platine mit ATmega328 und zwei Audioverstärkern

Qualität von zwei Leiterplattenfertigern vergleichen
Analoger Roboter
Aufgebaut ganz ohne Mikrocontroller. Die Logik besteht aus Logikgattern, Operationsverstärkern (für Komparativ und Schmitt-Trigger), Motortreibern (L293D). Als Antrieb für die Räder und den Sensorkopf dienten drei Servos. Hinderniserkenung mit Sharp IR-Distanzmesser.
Schuhe bleichen


Als Abschluss etwas ohne Elektronik. Blaue Schuhe haben angefangen sich zu verfärben und sahen nicht mehr so toll aus. Also raus mit der Farbe 🙂